分类 工作学习 下的文章

对短波通信选频的思考
0 前言 最近几年接触并参与了几个短波通信选频的项目,从算法实现到服务界面设计,都有过深度参与的经历。但受限于各种因素,每次的设计在我看来都不是那么的完善...
-
 1514
1514
 0
0
 1
1
-
 工作学习
工作学习
【GFZ】地磁指数与太阳指数
0 前言 介绍如何下载德国地学中心GFZ提供的地磁行星3小时Kp指数、相关地磁指数和太阳指数。 1 GFZ-FTP 1.1 Kp_ap_Ap_SN_F10...
-
1716
0
1
-
工作学习
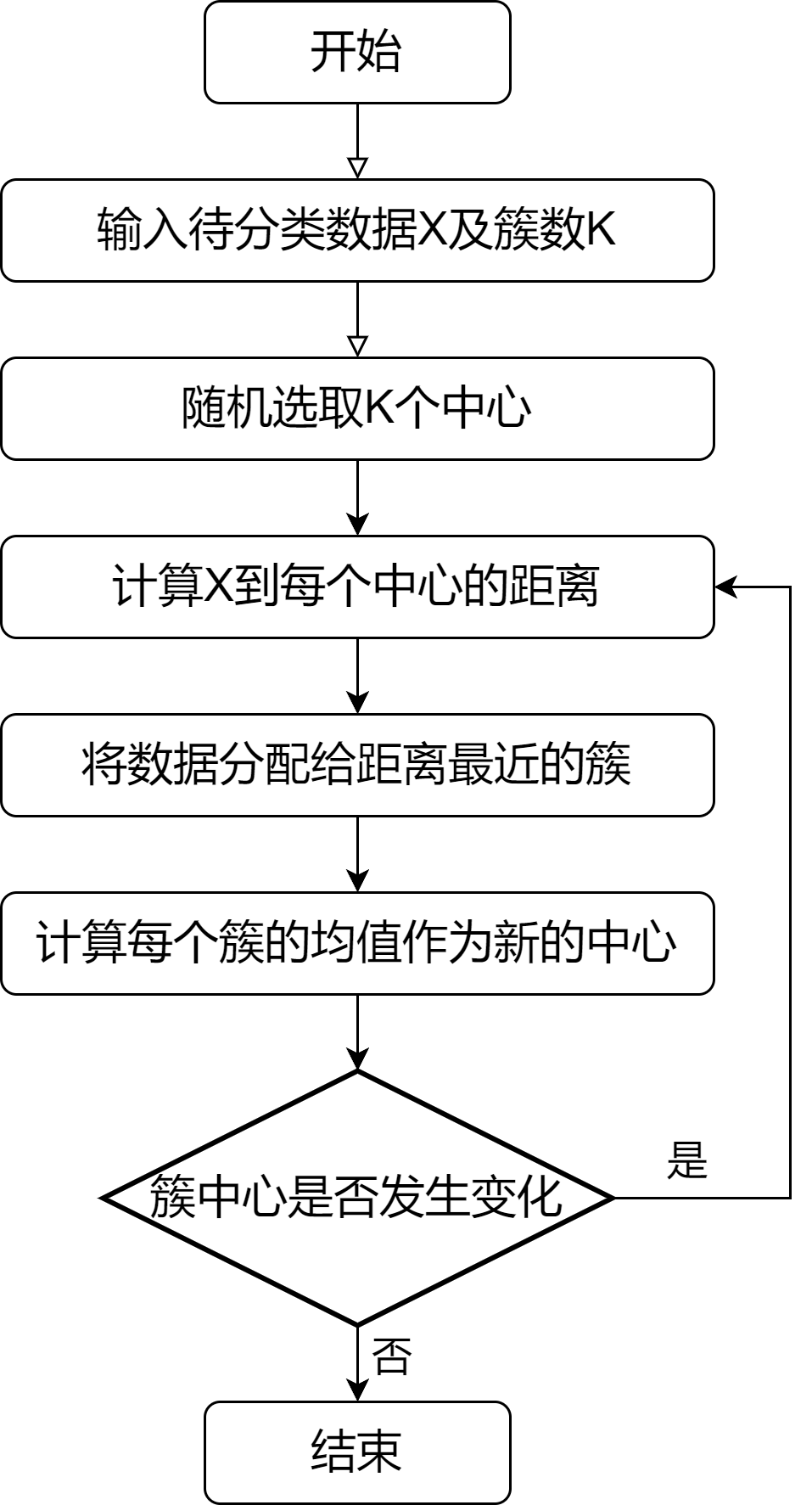
K-means聚类算法原理
0 前言 聚类是数据处理中常用的分析方法,此处简单介绍下K-means聚类算法原理。 1 K-means算法 1.1 算法简介 K-means标准算法是1...
-
1146
0
0
-
工作学习

2024-05-27 X2.8级太阳耀斑
北京时间2024年5月27日14:53,太阳爆发了一个X2.8级X射线耀斑,于15:24结束,如下展示的是NASA 304A波段的太阳观测视频。 ...
-
835
0
2
-
工作学习

Savitzky-Golay滤波器原理-01
0 前言 最近在看文章时,发现有人使用Savitzky-Golay滤波器对数据进行预处理,提取背景值,尝试之后发现效果显著。因此,简单研究下Savitzk...
-
2028
0
1
-
工作学习

空间物理数据材料整理
0 前言 简单汇总下空间物理学领域部分数据、材料相关的FTP、网站等。 1 数据汇总 序号 简介 链接 备注 1 地磁与太阳活动指数 NOA...
-
916
0
0
-
工作学习
史瓦西黑洞最内稳定圆轨道计算
0 前言 最内稳定圆轨道(Innermost Stable Circular Orbit,ISCO)是测试粒子可以稳定地绕广义相对论中的大质量物体运行的最...
-
1659
0
1
-
工作学习
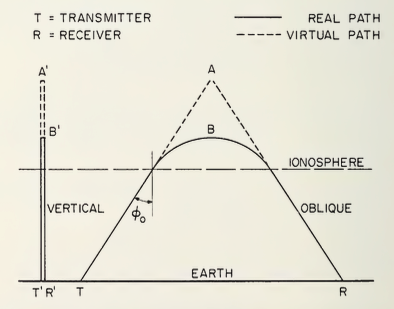
高频传播特性的等效关系
0 前言 短波通信是一种常见的通信方式,其利用高频(High Frequency,HF)电磁波在电离层和地面之间的一次或多次反射,最远可将信号传至上万公里...
-
1138
0
0
-
工作学习